Projects
(1) Algorithms for identifying interesting patterns in complex data
My team has made several contributions to the field of pattern mining, focusing on the design of efficient, scalable, and interpretable algorithms for discovering interesting patterns in large datasets. The aim is to uncover patterns in data that may reveal some interesting insights. These patterns can be discovered in varous types of data (sequences, graphs, etc.) and be used for decision-making, and variosu downstream tasks such as classification and outlier detection.
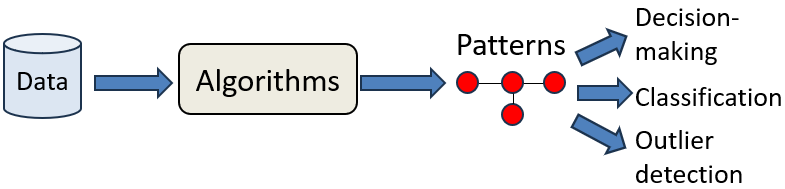
The general process of pattern mining
My team has designed many efficient algorithms for various pattern mining tasks such as the discovery of frequent patterns, sequential patterns, subgraphs, high-utility itemsets, and association rules. Some notable contributions include algorithms such as TKS, MaxSP, RuleGrowth, FHM, EFIM, TKG and CM-SPADE, which address challenges such as discovering the top-k most frequent subsequences in sequences, discovering frequently co-occurring values in records, and identifying frequent subgraphs in graphs. To support research and practical applications in pattern mining, I have founded the SPMF open-source data mining library, which integrates a large collection of pattern mining algorithms and is used worldwide for teaching, research, and industrial applications (SPMF has been used in over 1000 research projects).. The algorithms that my team has proposed have been applied in diverse domains including bioinformatics, web analytics, recommender systems, and education, with an emphasis on producing results that are both efficient and actionable.
Some publications on this topic:
- Chen, E., Nawaz, M. Z, Nawaz, M., Fournier-Viger, P., Sun, M. (2025). HMP: Efficient Heuristic Algorithms for MDL-Based Itemset Mining. Applied Soft Computing, Elsevier. 104: 107200
- Nawaz, M. Z., Nawaz, M. S., Fournier-Viger, P. Selmaoui-Folcher, N. (2025) GRIMP: A Genetic Algorithm for Compression-based Descriptive Pattern Mining. Expert Systems, Wiley, 42(5)
- Ouarem, O., Nouioua, F., Fournier-Viger. (2023). Discovering Frequent Parallel Episodes in Complex Event Sequences by Counting Distinct Occurrences. Applied Intelligence, 54(11-12): 701-721
- Liu, J., Fournier-Viger, P., Zhou, M., He, G., Nouioua, M. (2022). CSPM: Discovering Compressing Stars in Attributed Graphs. Information Sciences, Elsevier, 609: 172-194
- QU, J.-F., Fournier-Viger, P., Liu, M., Hang, B., Hu, C. (2023). Mining High Utility Itemsets Using Prefix Trees and Utility Vectors. IEEE Transactions on Knowledge and Data Engineering (TKDE), 35(10):10224-10236
- Fournier-Viger., P., Lin, J. C.-W., Truong, T., Nkambou, R. (2019). A survey of high utility itemset mining. In: Fournier-Viger et al. (eds). High-Utility Pattern Mining: Theory, Algorithms and Applications, Springer (to appear), p. 1-46. DOI: 10.1007/978-3-030-04921-8_1
- Ouarem, O., Nouioua, F., Fournier-Viger, P. (2023). A Survey of Episode Mining. WIREs Data Mining and Knowledge Discovery, Wiley,14(2):e1524.
- Fournier-Viger, P., He, G., Cheng, C., Li, J., Zhou, M., Lin, J.C-W., Yun, U. (2020). A Survey of Pattern Mining in Dynamic Graphs. WIREs Data Mining and Knowledge Discovery, Wiley, 10(6).
- Fournier-Viger, P., Lin, J. C.-W., Vo, B, Chi, T.T., Zhang, J., Le, H. B. (2017). A Survey of Itemset Mining. WIREs Data Mining and Knowledge Discovery, Wiley, e1207 doi: 10.1002/widm.1207, 18 pages.
- Fournier-Viger, P., Lin, J. C.-W., Koh, Y. S., Thomas, R. (2017). A Survey of Sequential Pattern Mining. Data Science and Pattern Recognition (DSPR), vol. 1(1), pp. 54-77.
(2) Algorithms for biological data analysis
My research team has recently conducted extensive work on biological data analysis, with a particular focus on genomic and protein sequence data. Our research integrates advanced techniques from pattern mining, machine learning, and computational biology to better understand complex biological sequences such as viral genomes.
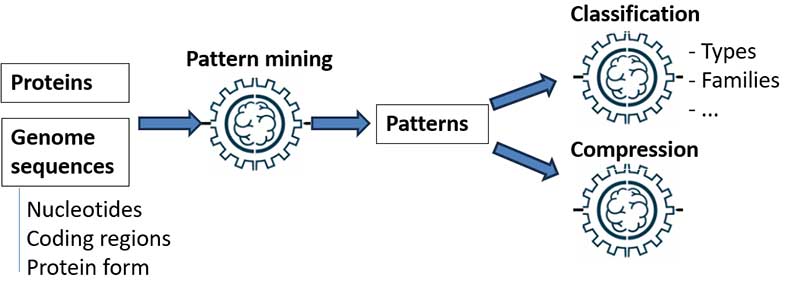
Classification and compression of biological data
In this line of work, we have developed and applied pattern mining algorithms (e.g., frequent sequential pattern mining) to extract discriminative subsequences from genomic data, enabling improved classification of proteins and biological entities. We have also explored sequence prediction models to capture temporal and structural dependencies in biological sequences, as well as alignment-free methods, which provide scalable alternatives to traditional alignment-based approaches for large-scale genome analysis.Additionally, we have proposed novel mutation analysis algorithms to study variations in viral genomes (including SARS-CoV-2), allowing us to identify meaningful patterns related to evolution, classification, and functional properties. We have also design an algorithm (HMG) for genome sequence compression based on patterns. Several of our frameworks combine interpretability with high predictive performance, making them suitable for real-world bioinformatics applications such as protein family classification, genome comparison, and disease-related sequence analysis.
Some publications on this topic:
- Nawaz, M. Z., Nawaz, M. S., Fournier-Viger, P., Nawaz, S., Lin, J. C.-W., Tseng, V.S. (2025). Efficient Genome Sequence Compression via the Fusion of MDL-Based Heuristics. Information Fusion. 120: 103083.
- Nawaz, M. S., Fournier-Viger, P. Nawaz, S. Wu, Y., Song, W. (2025) HieRMVir: Interpretable Viral Classification via Hierarchical Deep Learning. IEEE Journal of Biomedical and Health Informatics.
- Nawaz, M. S., Fournier-Viger, P., Nawaz, S., Gan, W., He, Y. (2024). FSP4HSP: Frequent sequential patterns for the improved classification of heat shock proteins, their families, and sub-types. International Journal of Biological Macromolecules (BIOMAC). Elsevier
- Nawaz, M. S., Fournier-Viger, P., Nawaz, S., Zhu, H., Yun U. (2024). SPM4GAC: SPM based approach for genome analysis and classification of macromolecules. International Journal of Biological Macromolecules (BIOMAC). Elsevier
- Nawaz, M. S., Nawaz, M. Z., Gong, Y., Fournier-Viger, P., Diallo, A. B. (2024). In-Silico Framework for Genome Analysis . Future Generation Computer Systems, Elsevier
- Nawaz, S. M., Nawaz, Z., Zhang, J., Fournier-Viger, P., Qu, J. (2024). Exploiting the Sequential Nature of Genomic Data for Improved Analysis and Identification. Computers in Biology and Medicine (CIBM), Elsevier
- Nawaz, S. M., Fournier-Viger, P., He, Y., Zhang, Q. (2023). PSAC-PDB: Analysis and Classification of Protein Structures. Computers in Biology and Medicine (CIBM), Elsevier, 158: 106814
- Nawaz, S., Fournier-Viger, P., Aslam, M., Li, W., He, Y., Niu, X. .(2023). Using Alignment-Free and Pattern Mining Methods for SARS-CoV-2 Genome Analysis. Applied Intelligence
- Aslam, M., Nawaz, M. S., Fournier-Viger, P., Li, W. (2023). Comparative Analysis and Classification of SARS-CoV-2 Spike Protein Structures in PDB. COVID journal
- Nawaz, S., Fournier-Viger, P., Shojaee, A., Fujita, H. (2021). Using Artificial Intelligence Techniques for COVID-19 Genome Analysis. Applied Intelligence, to appear. [source code and data + SPMF]
- Nawaz, M. S., Fournier-Viger, P., Niu, X., Wu, Y. (2021). COVID-19 Genome Analysis using Alignment-Free Methods. Proc. 34thd Intern. Conf. on Industrial, Engineering and Other Applications of Applied Intelligent Systems (IEA AIE 2021), Springer LNAI, 12 pages
- Noor, S., Guo, Y., Shah, S. H. H., Fournier-Viger, P., Nawaz, M. S. (2020). Analysis of Public Reaction to the Novel Coronavirus (COVID-19) Outbreak on Twitter. Kybernetes, Emerald Publishing
(3) Algorithms for sequence analysis
A sequence is an ordered list of symbols or events, a fundamental data structure that appears across a wide range of domains. In bioinformatics, sequences include DNA, RNA, protein sequences, and microarray data. In other areas, sequences arise as user navigation paths on websites, customer transaction histories, sensor and weather observations, educational activity logs, and electronic health records. To analyze such data, a key approach is sequential pattern mining, which aims to identify recurring, meaningful patterns that respect the order of events. Classical algorithms algorithms to discover sequential patterns such as PrefixSpan, SPAM, SPADE, and AprioriAll have laid the foundation for this field. Building on these principles, I have developed several advanced algorithms to address important challenges such as scalability, redundancy reduction, constraint handling, and top-k pattern discovery.
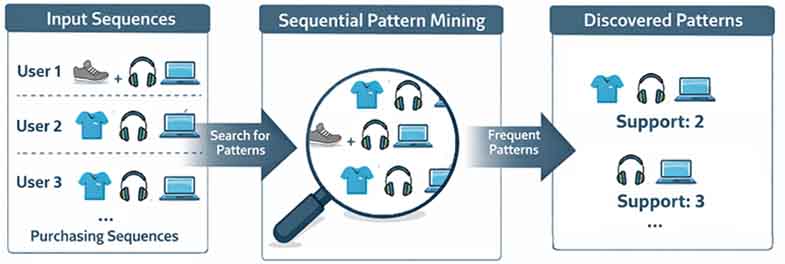
Sequential pattern mining
These algorithms have been applied in various domains such as e-learning (in the CanadarmTutor project), for webclick stream analysis (Fournier-Viger et al., 2012), manufacturing simulation (Kamsu-Foguem et al., 2013), quality control (Bogon et al., 2012), analyzing visitor movements (Orellana, 2011), modelling trends on social web (Christiansen, 2013) and restaurant recommendation (Han et al., 2012). Source code of the algorithms have been released as part of the open-source data mining library SPMF. Some publications on this topic:
- Duong, H., V., Truong, T. C., Le, B., Fournier-Viger P. (2024). Mining Interesting Sequential Patterns using a Novel Balanced Utility Measure. Knowledge-Based Systems (KBS), 294: 111796 (2024)
- Ouarem, O., Nouioua, F., Fournier-Viger, P. (2023). A Survey of Episode Mining. WIREs Data Mining and Knowledge Discovery, Wiley,14(2):e1524.
- Fournier-Viger, P., Lin, J. C.-W., Koh, Y. S., Thomas, R. (2017). A Survey of Sequential Pattern Mining. Data Science and Pattern Recognition, vol. 1(1), pp. 54-77.
- Ouarem, O., Nouioua, F., Fournier-Viger. (2023). Discovering Frequent Parallel Episodes in Complex Event Sequences by Counting Distinct Occurrences. Applied Intelligence, 54(11-12): 701-721
- Fournier-Viger, P., Nawaz, M. S., He, Y., Wu, Y., Nouioua, F., Yun, U. (2022). MaxFEM: Mining Maximal Frequent Episodes in Complex Event Sequences. Proc. of the 15th Multi-disciplinary International Conference on Artificial Intelligence (MIWAI 2022), pp. 86-98, Springer LNAI
- Fournier-Viger, P. Li, Y., Nawaz, M. S., He, Y. (2022) FastTIRP: Efficient discovery of Time-Interval Related Patterns. Proc. of 10th Intern. Conf. on Big Data Analytics (BDA 2022), Springer
- Fournier-Viger, P., Gomariz, A., Gueniche, T., Mwamikazi, E., Thomas, R. (2013). Efficient Mining of Top-K Sequential Patterns. Proc. 9th International Conference on Advanced Data Mining and Applications (ADMA 2013), Springer, LNAI, 12 pages (to appear).
- Fournier-Viger, P., Faghihi, U., Nkambou, R., Mephu Nguifo, E. (2012). CMRules: Mining Sequential Rules Common to Several Sequences. Knowledge-based Systems, Elsevier, 25(1): 63-7
- Fournier-Viger, P., Nkambou, R. & Tseng, V. S. (2011). RuleGrowth: Mining Sequential Rules Common to Several Sequences by Pattern-Growth. Proceedings of the 26th Symposium on Applied Computing (ACM SAC 2011). ACM Press, pp. 954-959.
(4) Algorithms for sequence prediction and trajectory analysis
I have also contributed to the field of sequence prediction, which aims to predict the next event(s) in a sequence based on historical data. This problem is central to applications such as web recommendation, user behavior modeling, intelligent tutoring systems, and predictive analytics.
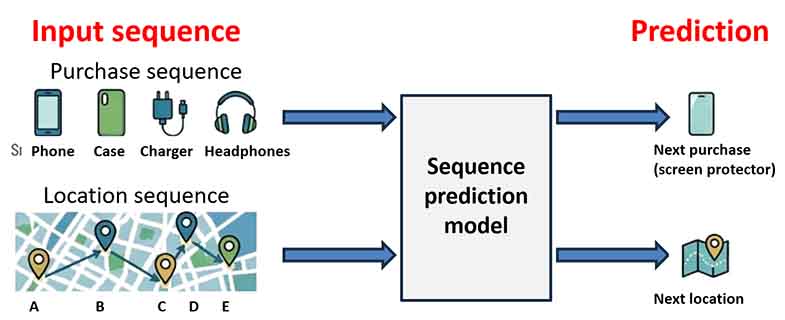
Sequence prediction
Key contributions include: (1) Compact Prediction Tree: a new data structure that provide more accurate sequence prediction than popular approaches such as All-K-Markov, Dependency Graph and PPM for data such as web click stream. Experimental results show that CPT outperforms well-known approaches such as All-Kth Order Markov models, Dependency Graphs, and Prediction by Partial Matching (PPM), particularly for complex datasets such as web clickstreams (Gueniche et al., 2013). (2) Sequential rule-based prediction algorithm: an approach that leverages sequential rules for prediction, offering a flexible and interpretable framework for modeling sequential dependencies (ADMA 2012). These methods emphasize both prediction accuracy and model interpretability, providing practical solutions for real-world sequential data analysis tasks. Moreover, I have done several collaborations on the topic of trajectory analysis. Some papers that my team has published on this topic are:
- Gueniche, T., Fournier-Viger, P., Tseng, V.-S. (2013). Compact Prediction Tree: A Lossless Model for Accurate Sequence Prediction. Proc. 9th International Conference on Advanced Data Mining and Applications (ADMA 2013), Springer, LNAI, 12 pages (to appear).
- Fournier-Viger, P. Gueniche, T., Tseng, V.S. (2012). Using Partially-Ordered Sequential Rules to Generate More Accurate Sequence Prediction. Proc. 8th International Conference on Advanced Data Mining and Applications (ADMA 2012), Springer LNAI 7713, pp.431-442.
- Li, M., Niu, X., Zhu, J., Fournier-Viger, Wu, Y. (2025). STR: Spatio-temporal Trajectory Representation Learning with Dual-Focus Encoder for Whole Trajectory Similarity Computation. Information Fusion. volume 123, article 103231.
- Wang, S., Niu, X., Fournier-Viger, P., Zhou, D., Min, F. (2022) A Graph Based Approach for Mining Significant Places in Trajectory Data. Information Sciences, Elsevier
- Zhu, J., Niu, X., Li, F., Wang, Y., Fournier-Viger, P., She, K. (2024). STTraj2Vec: A spatio-temporal trajectory representation learning approach. Knowledge-Based Systems (KBS), Elsevier, Volume 300, article 11220
- Amirat, H., Lagraa, N., Fournier-Viger, P., Ouinten, Y., Kherfi, M. L., Guellouma, Y. (2022) Incremental Tree-based Successive POI Recommendation in Location-based Social Networks . Applied Intelligence, 53(7): 7562-7598
- Amirat, H., Benslimane, A., Fournier-Viger, P., Lagraa, N. (2018). LocRec: Rule-based Successive Location Recommendation in LBSN. Proceedings of 2018 IEEE International Conference on Communications (ICC 2018), IEEE,
(5) Cybersecurity: detection of metamorphic malware using sequential pattern mining
I have contributed to the problem of authorship attribution, which aims to identify the author of a text based on writing style. This is formulated as a supervised classification task, where models are trained on documents from known authors and used to classify anonymous texts.Our approach relies on sequential pattern mining applied to part-of-speech (POS) sequences. By extracting frequent patterns such as n-grams and skip-grams, we capture syntactic writing habits that are characteristic of each author. This method is more robust to topic variation than word-based approaches, as it focuses on grammatical structure rather than vocabulary. We also explored variable-length patterns, which improve the representation of complex writing styles
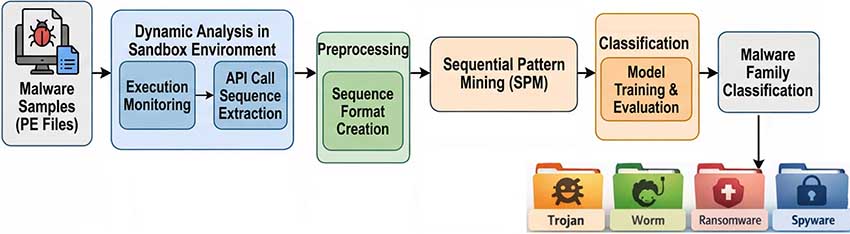
Malware detection using MalSPM
Some publications on this topic:
- Nawaz, M. S., Fournier-Viger, P., Nawaz, M. Z., Chen, G., Wu, Y. (2022) MalSPM: Metamorphic Malware Behavior Analysis and Classification using Sequential Pattern Mining. Computers & Security, Elsever,
- Nawaz, M. S., Fournier-Viger, P., Chen, G., Nawaz, M. Z., Wu, Y. (2021). Metamorphic Malware Behavior Analysis using Sequential Pattern Mining. Proceedings of the 1st Workshop on Machine Learning in Software Engineering (MLiSE 2021). PKDD 2021 Workshop proceedings, Springer
(6) Algorithms for graph analysis with application in telecommunication networks
My team has contributed to the analysis of complex graph-structured data with various applications such as event analysis in telecommunication networks. The proposed approach models data as attributed graphs integrating topology, attributes, and temporal information, and applies pattern mining techniques to extract meaningful structures. In particular, star-shaped and subgraph patterns are discovered to capture strong relationships between attribute valuesin graphs. By leveraging information-theoretic principles such as minimum description length, the method identifies concise and informative patterns. These patterns provide interpretable insights that can support tasks such as alarm correlation analysis, fault localization, and decision-making in large-scale network systems and for other applications.
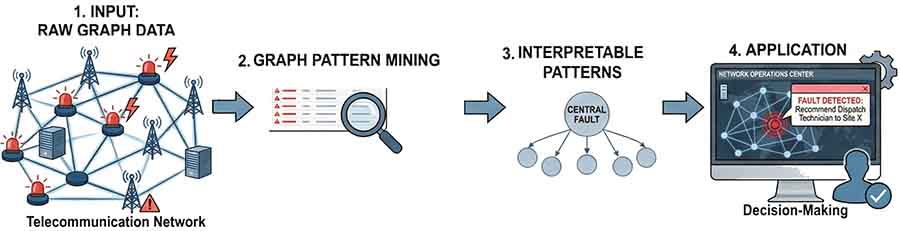
Identification of important patterns in graphs
Some publications on this topic:
- Liu, J., Fournier-Viger, P., Zhou, M., He, G., Nouioua, M. (2022). CSPM: Discovering Compressing Stars in Attributed Graphs. Information Sciences, Elsevier, 609: 172-194
- Liu, J., Zhou, M., Fournier-Viger, P., Yang, M., Pan, L., Nouioua, M. (2022) Discovering Representative Attribute-stars via Minimum Description Length. Proc. of the 38th IEEE International Conference on Data Engineering (ICDE 2022), 12 pages
- Fournier-Viger, P., Ganghuan, H., Zhou, M., Nouioua, M., Liu, J. (2020). Discovering Alarm Correlation Rules for Network Fault Management. Proc. of the International Workshop on Artificial Intelligence for IT Operations (AIOPS), in conjunction with the 18th International Conference on Service-Oriented Computing (ICSOC2020) conference,
- Nouioua, M., Fournier-Viger, P., He, G., Nouioua, F., Min, Z. (2020). A Survey of Machine Learning for Network Fault Management. In the book “Machine Learning and Data Mining for Emerging Trends in Cyber Dynamics”, Springer
- Fournier-Viger, P., He, G., Cheng, C., Li, J., Zhou, M., Lin, J.C-W., Yun, U. (2020). A Survey of Pattern Mining in Dynamic Graphs. WIREs Data Mining and Knowledge Discovery, Wiley, 10(6).
- Fournier-Viger, P., Cheng, C., Cheng, Z., Lin, J. C.-W., Selmaoui-Folcher, N. (2019). Mining Significant Trend Sequences in Dynamic Attributed Graphs. Knowledge-Based Systems (KBS), Elsevier,
- Zhi, C., Andriamampianina, L., Ravat, F., Song, J., Valles-Parlangeau, N., Fournier-Viger, P., Selmaoui-Folcher, N. (2023) Mining Frequent Sequential Subgraph Evolutions in Dynamic Attributed Graphs. Proc. 27th Pacific-Asia Conf. Knowledge Discovery and Data Mining (PAKDD 2023), Springer
- Fournier-Viger, P., He, G., Lin, J. C.-W., Gomes, H. M. (2020). Mining Attribute Evolution Rules in Dynamic Attributed Graphs. Proc. 22nd Intern. Conf. on Data Warehousing and Knowledge Discovery (DAWAK 2020), Springer, pp. 167-182
(7) Algorithms for Renewable Energy Prediction
My team has also contributed to the problem of renewable energy prediction, which aims to classify and forecast wind and photovoltaic (PV) power from heterogeneous data sources. We proposed HUF4WP (High-Utility Framework for Wind/PV Power), a data-fusion framework that transforms continuous data into a discretized form and assigns feature importance using SHAP. It then applies high-utility pattern mining techniques to discover the most informative feature interactions, which are used to build interpretable classification models. This approach improves prediction performance while providing insights into key factors driving energy generation.
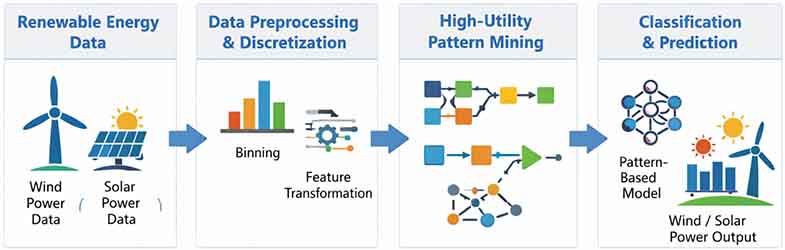
High-utility pattern-driven classification for wind and solar energy prediction with HUF4WP
Some publications on this topic:
- Nawaz, M. S., Fournier-Viger, P., Nawaz, M. Z., He, Y., Yun, U. (2025).HUF4WP: A Data-Fusion Framework Leveraging High-Utility Patterns for Renewable Energy Classification. Information Fusion.
(8) Social network analysis
My team has also contributed to the problem of inferring user profiles in online social networks, which aims to predict missing user attributes from limited publicly available data. Unlike traditional methods requiring full graphs and training data, we proposed PGPI (Partial Graph Profile Inference), a framework designed to operate on partial social graphs without training. Our approach combines structural information (friendship links) and rich data such as group memberships, likes, and views (PGPI-N and PGPI-G). We also introduced PGPI+, which handles both nominal and numeric attributes and estimates prediction certainty, allowing a trade-off between accuracy and data access.
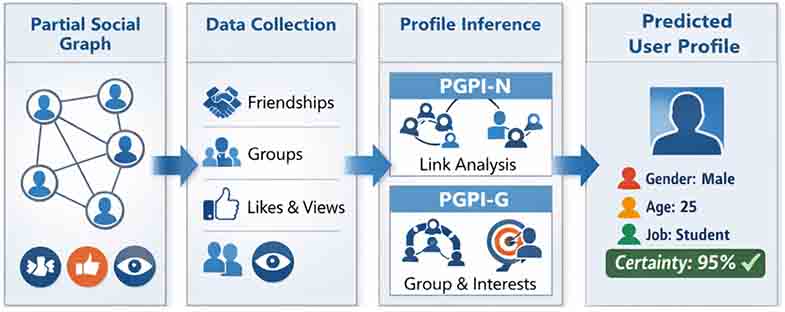
Inferring the profiles of social network users based on friendships, groups and likes with PGPI
Some publications on this topic:
- Dougnon, Y. R., Fournier-Viger, P., Lin, J. C.-W., Nkambou, R. (2016). Inferring Social Network User Profiles using a Partial Social Graph. Journal of Intelligent Information Systems (JIIS), Springer, 47(2): 313-344
- Dougnon, Y. R., Fournier-Viger, P., Lin, J. C.-W., Nkambou, R. (2015). More Accurate User Profile Inference in Online Social Networks. Proceedings of the 14th Mexican Intern. Conference on Artificial Intelligence (MICAI 2015), Springer LNAI 9414, pp. 533-546
- Dougnon, Y. R., Fournier-Viger, P., Lin, J. C.-W., Nkambou, R. (2015). Accurate Social Network User Profiling. Proc. 38th German Conference on Artificial Intelligence (KI 2015), Springer LNAI 9324, pp. 265-270.
- Dougnon, Y. R., Fournier-Viger, P., Nkambou, R. (2015). Inferring User Profiles in Social Networks using a Partial Social Graph. Proc. 28th Canadian Conference on Artificial Intelligence (AI 2015), Springer, LNAI 9091, pp. 84-99.
(9) Algorithms for authorship attribution
I have contributed to the problem of authorship attribution, which aims to identify the author of a text based on writing style. This is formulated as a supervised classification task, where models are trained on documents from known authors and used to classify anonymous texts.Our approach relies on sequential pattern mining applied to part-of-speech (POS) sequences. By extracting frequent patterns such as n-grams and skip-grams, we capture syntactic writing habits that are characteristic of each author. This method is more robust to topic variation than word-based approaches, as it focuses on grammatical structure rather than vocabulary. We also explored variable-length patterns, which improve the representation of complex writing styles
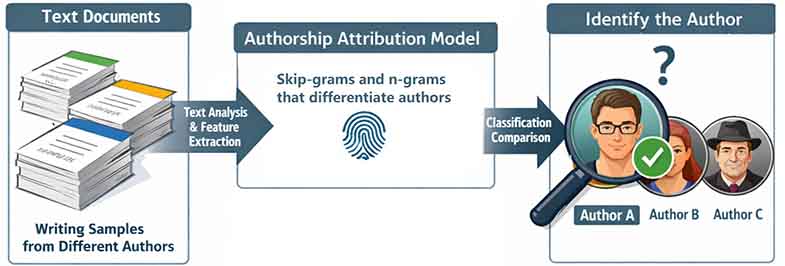
Authorship attribution
Some publications on this topic:
- Pokou J. M., Fournier-Viger, P., Moghrabi, C. (2016). Authorship Attribution Using Small Sets of Frequent Part-of-Speech Skip-grams. Proc. 29th Intern. Florida Artificial Intelligence Research Society Conference (FLAIRS 29), AAAI Press, pp. 86-91
- Pokou J. M., Fournier-Viger, P., Moghrabi, C. (2016). Using Frequent Fixed or Variable-Length POS Ngrams or Skip-grams for Blog Authorship Attribution . Proc. 12th Intern. Conf. on Artificial Intelligence Applications and Innovations (AIAI 2016), Springer LNAI, pp. 63-74 [datasets].
- Pokou J. M., Fournier-Viger, P., Moghrabi, C. (2016). Authorship Attribution using Variable-Length Part-of-Speech Patterns. Proc. 7th Intern. Conf. on Agents and Artificial Intelligence (ICAART 2016), pp. 354-361
(10) Intelligent e-learning systems
This research focuses on enhancing intelligent tutoring systems through data mining, and cognitive modeling.
Data Mining for Intelligent Tutoring Agents
We have developped data mining algorithms to discover temporal patterns in the behavior of intelligent tutoring agents. These algorithms have been applied in two tutoring agents integrated in the CanadarmTutor tutoring system, an environment for learning to operate the Canadarm robotic arm in a 3D virtual environment simulating the international space station. First, we have build an agent that can learn a task by observation. It proceeds by recording the behavior of other agents and then extracts frequent patterns from this data. In our application, this allowed the tutoring agent to learn domain knowledge by observing humans. The agent can then use this knowledge to provide tailored assistance to learners. Second, we have built an agent that learn from its own behavior by reusing behaviors that lead to self-satisfaction. This allow an author to provide the agent with different behaviors and to let the agent learn automatically which one is more succesful in different situations.
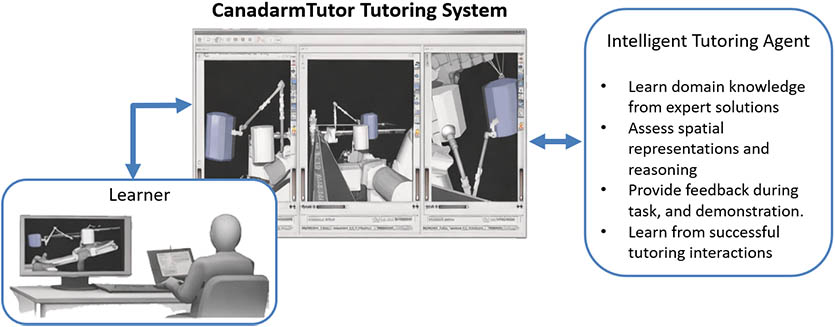
The CanadarmTutor / RomanTutor software that simulates operating a robotic arm on the International Space Station
Some publications on this topic:
- Fournier-Viger, P., Nkambou, R., Mayers, A., Mephu Nguifo, E., Faghihi, U. (2012). Multi-Paradigm Generation of Tutoring Feedback in Robotic Arm Manipulation Training. Proceedings of the 11th Intern. Conf. on Intelligent Tutoring Systems (ITS 2012), LNCS 7315, Springer, pp. 233-242.
- Fournier-Viger, P., Nkambou, R & Mephu Nguifo, E. (2008), A Knowledge Discovery Framework for Learning Task Models from User Interactions in Intelligent Tutoring Systems. Proceedings of the 7th Mexican International Conference on Artificial Intelligence (MICAI 2008). LNAI 5317, Springer, pp. 765-778.
- Fournier-Viger, P., Nkambou, R., Faghihi, U. & Mephu Nguifo, E. (2009). Mining Temporal Patterns to Improve Agents Behavior: Two Case Studies. In Cao, L.(Ed.) Data Mining and Multiagent Integration, Springer, 15 pages (to appear).
A Cognitive Model for Building "Cognitive Tutors"
To build learning environments that can provide tailored assistance to learners during learning activities, a popular solution is to model the cognitive processes of learners with a cognitive model. It allows a tutoring system to closely follow the reasoning of learners to then generate tailored assistance. This is the idea originally proposed in the Cognitive Tutors by Anderson et al. (1995). However, their cognitive model can be improved in several ways. For this reason, we have decided to build an alternative cognitive model. The model is directly inspired by the work on Cognitive Tutors. But it provides several originalities such as: providing a better evaluation of declarative (semantic) knowledge and spatial reasoning and incorporating ontologies for improving reusability of knowledge and building glass-box learning objects This work has resulted in a knowledge representation framework comprising mainly: (1) knowledge structures for representing cognitive processes, (2) an interpreter to simulate cognitive processes described with the knowledge structures, (3) a model-tracer that use the interpreter for determining what a learner is actually doing according to the knowledge structures.
The framework has been applied in the following projects:
- RomanTutor / CanadarmTutor, a tutoring system for learning to operate the Canadarm2 robotic arm.
- A visual authoring tool for the knowledge
structures:

- Redbool, a tutoring system for learning
to reduce boolean expressions (designed by multiple researchers of the ASTUS and GDAC labs)

- An early version of the GNT tutoring system for learning to perform restriction, digestion and reconstructing
DNA in a genetic lab (X. Zhao, M.Sc. 2004)

- An early version of an ACCC tutoring
system for DC Circuit Analysis (A. Abdessemed, J.F.
Lebeau et al., 2006).

Some publications on this topic:
- Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008). Evaluating Spatial Representations and Skills in a Simulator-Based Tutoring System. IEEE Transactions on Learning Technologies, vol. 1, no. 1, pp. 63-74, Jan-Mar, 2008.
- Fournier-Viger, P., Nkambou, R. & Mayers, A. (2008), Evaluating Spatial Knowledge through Problem-Solving in Virtual Learning Environments. Proceedings of the Third European Conference on Technology Enhanced Learning (EC-TEL 2008). LNCS 5192, Springer, pp 15-26.
- Fournier-Viger, P., Nkambou, R., Mayers, A. and Dubois, D. (2007), Automatic Evaluation of Spatial Representations for Complex Robotic Arms Manipulations. Proceedings of the 7th IEEE International Conference on Advanced Learning Technologies (ICALT 2007), pp: 279-281.
- Fournier-Viger P., Najjar, M., Mayers, A. & Nkambou, R. (2006). A Cognitive and Logic based Model for Building Glass-box Learning Objects. Interdisciplinary Journal of Knowledge and Learning Objects, Vol. 2. pp: 77-94.
- Fournier-Viger P., Najjar, M., Mayers, A. & Nkambou R. (2006). From Black-box Learning Objects to Glass-Box Learning Objects. Proc. 8th Intern. Conf. on Intelligent Tutoring Systems (ITS 2006). LNCS 4053, pp: 258-267, Springer-Verlag, Berlin.